





На китайской космической станции испытали руку-манипулятор
06.01.2022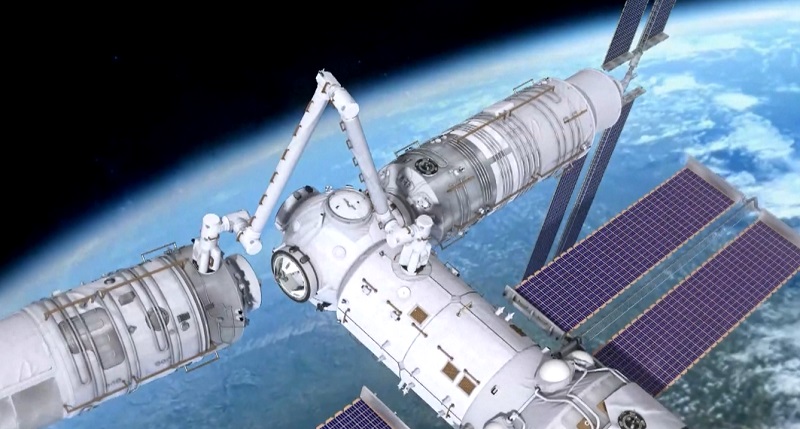
Успешное проведение испытательного перемещения китайского грузового космического корабля «Тяньчжоу-2» с помощью роботизированной руки-манипулятора подтвердило технические возможности для будущих стыковок лабораторных модулей с космической станцией.
Строительство китайской космической станции не может быть завершено за одну миссию, её необходимо собрать и построить в космосе с помощью нескольких космических запусков. На сегодняшний день в космос были уже запущены основной модуль «Тяньхэ» космической станции, грузовой космический корабль «Тяньчжоу» и пилотируемый космический корабль «Шэньчжоу». В будущем планируется запуск еще двух лабораторных модулей.

«Если перемещение завершится неудачей или эта функция будет недоступна, весь масштаб [нашей космической станции], вероятно, будет ограничен. На самом деле процесс перемещения – это технология, в которой нам приходится совершить прорыв в ходе строительства всей космической станции. Только когда мы овладеем этой технологией, вся космическая станция может быть завершена в срок», – отметил Ши Цзисинь, заместитель главного конструктора космической станции Китайской корпорации аэрокосмической науки и технологий (CASC).

Испытание перемещения грузового космического корабля «Тяньчжоу-2» было проведено с помощью роботизированной руки-манипулятора, установленной на основном модуле «Тяньхэ» космической станции. Рука-манипулятор заранее переместилась к порту возле узловой кабины основного модуля для подготовки к проведению испытания, после этого захватила грузовой космический корабль «Тяньчжоу-2».

«Я использую роботизированную руку-манипулятор, чтобы подтолкнуть грузовой космический корабль к разблокировке, а затем повернуть его и заставить вернуться для повторной стыковки и, наконец, снова провести блокировку», – пояснил Ши Цзисинь с помощью модели.
Ши Цзисинь сказал, что во время перемещения один конец руки-манипулятора был подключен к основному модулю, а другой конец – к грузовому космическому кораблю «Тяньчжоу-2». По его словам, такая структура очень нестабильна и может привести к повреждению руки-манипулятора, поэтому исследователи разработали специальное конструкторское решение для процесса переноса.

«Сначала я устанавливаю [грузовой космический корабль] вертикально, а затем разворачиваю его на 90 градусов, чтобы его подветренная сторона была наименьшей, и тем самым его полёт на орбите имел минимальные аэродинамические помехи. Он стоит как маятник, и весь модуль на самом деле устойчив к градиенту, и это значит, что независимо от того, в какую сторону я его переверну, он останется на вертикальной оси», – подробно объяснил специалист.










Подпишитесь на рассылку последних новостей.